|
ElevatorProject 3.1.7 Machine Control Design (VEX) Hardware: LV 4 Software: LV 4 |
Goals
Design the control system and a prototype of an elevator than can go between three floows in any combination. The prototype must include a set of three switches to represent each floor of the elevator. Each floor the elevator stops at must have a call button and a set of three lights to indicate the current floor level of the elevator. A built-in safety mechanism requires that the elevator normally rest on the groud floor and return to the ground floor after a user-determined period of nonuse.
Materials used in the project






This project is easily one of the most chanlleging project of all year. This Elevator project required strong team-collaboration, coding skills, building techniques as well as strong progress managing. This is the project that really pushed our thinkings and made us apply all the things that had been taught in the engineering lessons. The coding process had to come after the entire building process is finished and adjustments on codes are required after changes in structure, thus making the skill of project-management especially important. Just like the building, we had to come up multiple coding algorithms and then choose for a best one that fit the final design.
The Building Process
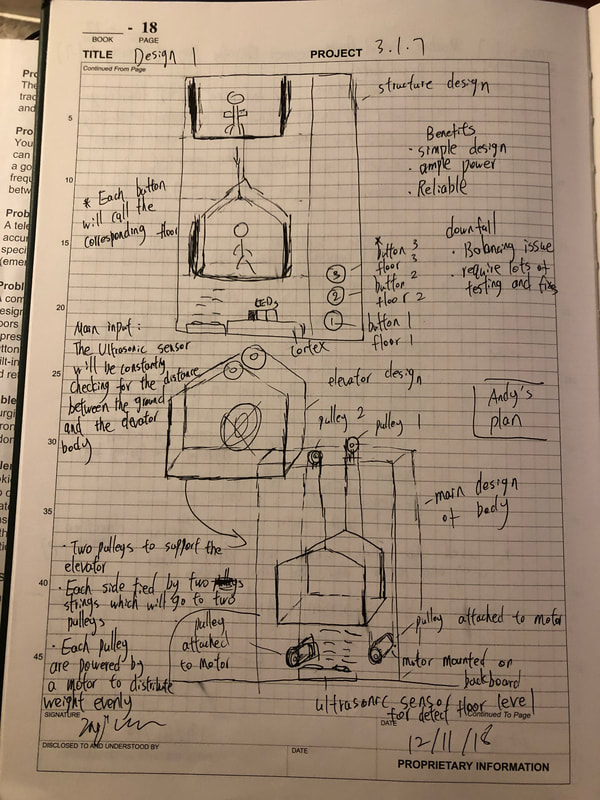
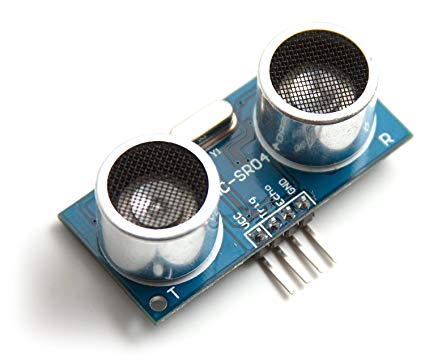
The first design of our group implements a dual-motor design featuring the Ultrasonic Sensor as a way of determining the floor level. It was aborted because the issue of balancing created by the two motors, and the two motors design is just an overkill in terms of power and torque it provided.
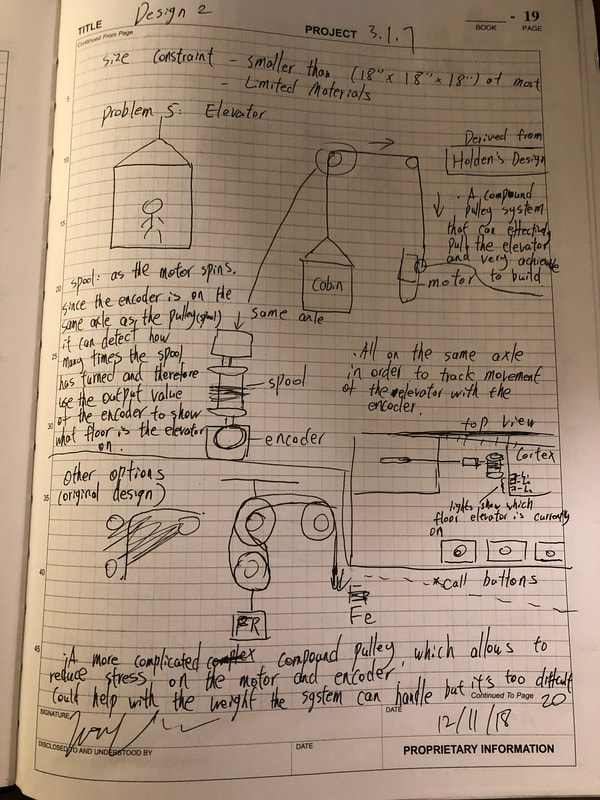
Our design 2 implements a compound pulley design that can effectively pull the elevator and is very simple to construct. We used a encoder this time to track the floor level of the elevevator, encoder tracks the angle of the spool turning and we theoretically could use that calculate the dsitance traveld by the elevator, however, it wasn't been implemented and was still added as backup is because the fact that the Ultrasonic sensor is just more accurate. If we were to use the encoder, it has to be on the same axle as the motor in order to correctly track the momvement of the elevator.
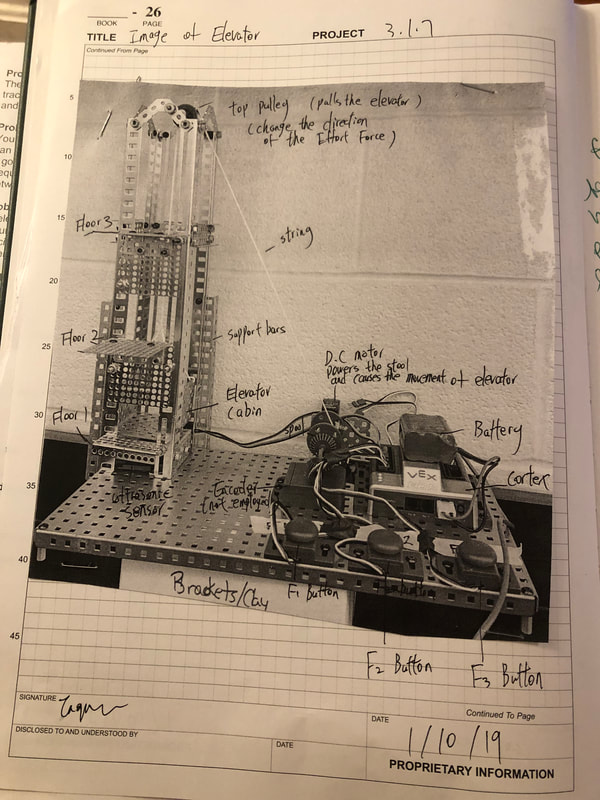
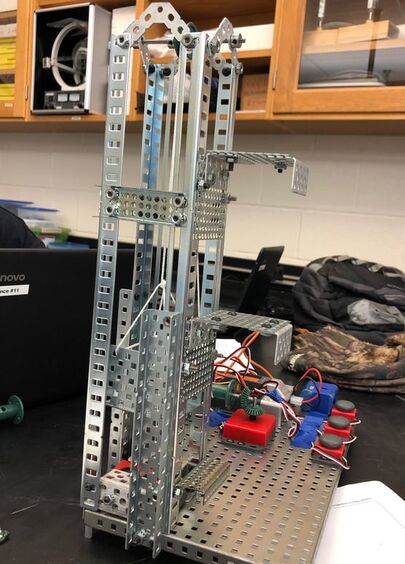
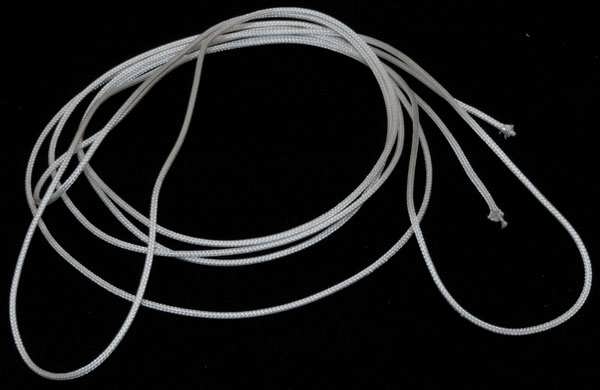
This design was finalize and built as a finsihed product. With a D.C motor at one end of the platform powering a spool which is connected to the levator at the top of the tower. The pulley on top and the spool on the bottom were connected by a white string so that when the motor powers the spool to roate clockwise(forward direction), it causes the pulley on top to roate in the same direction and the elevator is lifted up, by the same string.
|
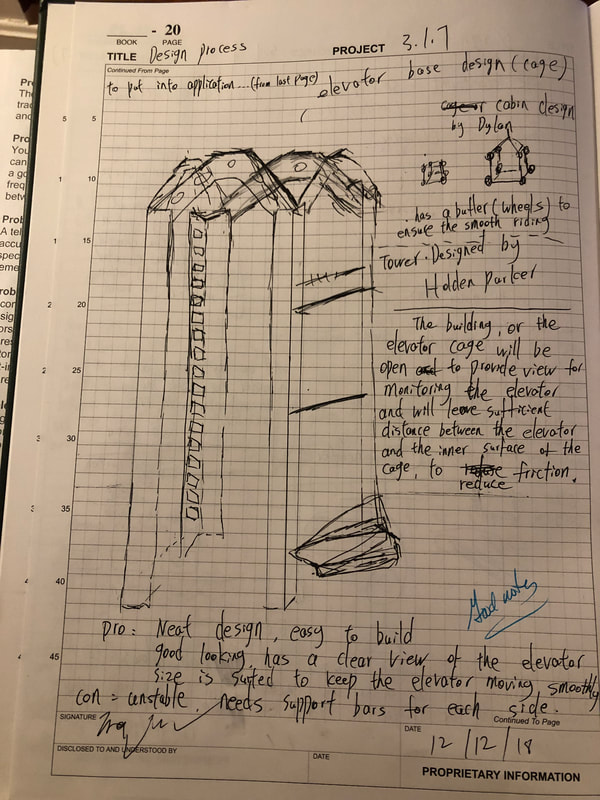
This is our tower design for the elevator, both staple and clean-looking. The tower of the elevator will be open and provide a clear view to monitor the movement of elevator and will leave sufficient distance between the elevator and the inner surface of the structure, to avoid friction. It is rather easy to build and fix but it does need support on each leg attached to the base to keep it stable. The elevator cabin design was also simple since we just used a ready-made vex parts as our cabin, instead of the cabin-car design with wheels attached as we are thinking previously.
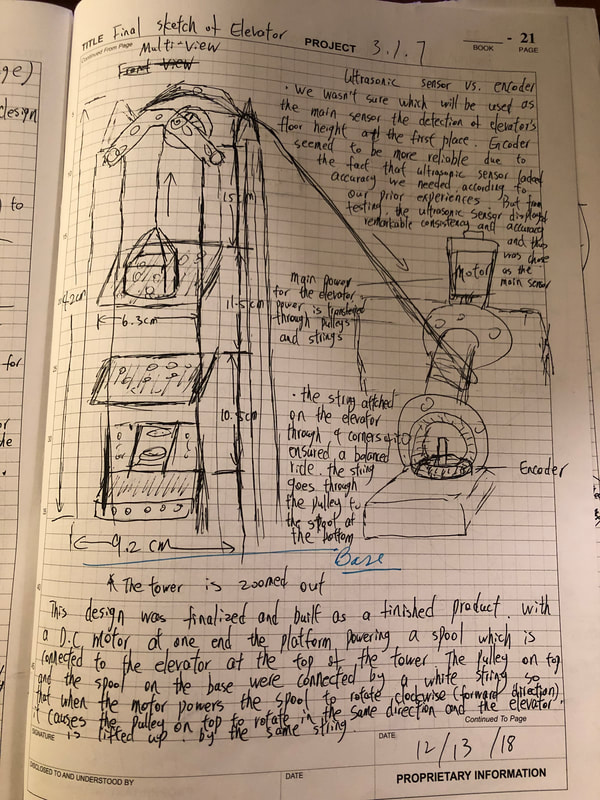
The final design of our elevator is shown above, with the use only one string and one motor. The DC motor on the bottom turns the spool on the top of the tower, the stool drives the string, and the string pulls the elevator either up or downward, all controlled by the three swtiches for each floor level.
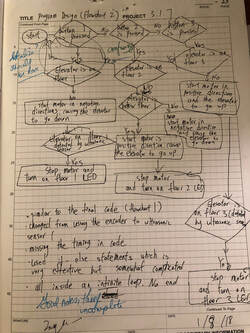
Our final flow chart for the seemingly complex program, it's the most clear flow chart amist all our other designs so it was chosen.
|
Finished Elevator Demonstration
At first, we wasn't sure which to use as our main sensor for the detection of the elevator's floor height-- the optical encoder or the ultrasonic sensor. Encoder proved to be more accurate according to our prior knowledge. But through testing, we found that the ultrasonic sensor displayed incredible consistency and accuracy we needed for thisnproject and it is easier to program.
|
|
|
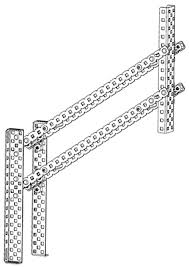
The most diffcult problem that we encountered in the process of the building of this elevator prototype is the stabilization of the tower and the porgraming of the ultrasonic sensor. Since the tower is fairly tall (42cm), the tower was wobbling and a little shacky in the beginning, that was due to the lack of supports of the sides of the tower. We solved that problem by adding support bars to three sides of the tower so its base is tight with the platform. We also attached bars to 2 of the sides mid-way up, helping it maintain the structure. Even though the ultrasonic sensor is more reliable than the encoder, we still had diffculties setting it up. It took us quite some time to test the distance btween each floors with the ultrasonic sensor, fixing the variable for each floor level distance in the code and adjust the floor level distance accordingly.
Overall, our final design was a success, it is reliable, it's consistent, and it has all the functionalities required. Since this is a large group project, thus teamwork was consequently very crucial and among the many other important engeering skills I have learned from the project, collababoration is definitely the one that benefited me the most.
Overall, our final design was a success, it is reliable, it's consistent, and it has all the functionalities required. Since this is a large group project, thus teamwork was consequently very crucial and among the many other important engeering skills I have learned from the project, collababoration is definitely the one that benefited me the most.
